Controls of Trajectories for Targeting of Magnetic Robotics in body
Magnetic Robotics of Biomedical Application
DOI:
https://doi.org/10.14464/ess41197Abstract
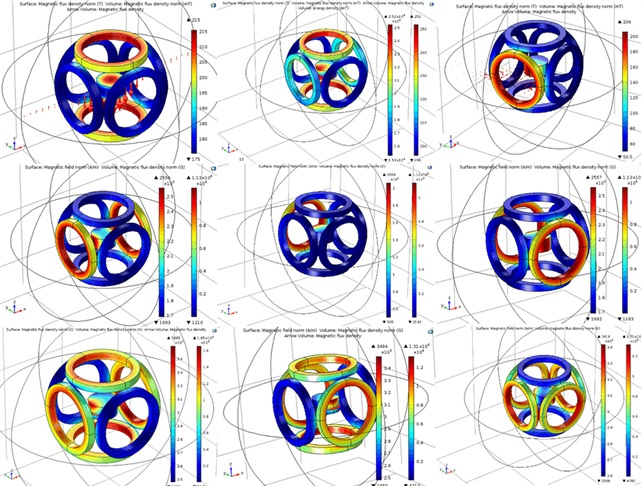
This paper presents a novel method to actively control magnetic field in a region-of-interest using three pairs electromagnetic coils system referred to here as extended distributed treatment Robotics. The developed controls of trajectories for targeting of magnetic robotics in body system contains hardware, software and magnetic Robotics/nanoscale material and the in vitro manipulation in real time. In this study, we used six identical solenoids coil placed on an XYZ-axis and the electromagnet was powered by current that can generate a high-gradient magnetic field in the desired direction. Real-time video microscopy supported by the LabVIEW vision system is integrated into the developed system for real-time monitoring. Moreover, the detection of object function is done through NI Vision Assistant, tracking function is through Math Script node in the LabVIEW simulation and ROI magnetic field actual measurement is done by the real-time magnetic sensor. The motion speed and direction of the Magnetic Robotics can also be manipulated using EMM system and Joystick controller.
Downloads
Published
Issue
Section
License
Copyright for articles published in this journal is retained by the authors. The content is published under a Creative Commons Licence Attribution 4.0 International (CC BY 4.0). This permits use, distribution, and reproduction in any medium, provided the original work is properly cited, and is otherwise in compliance with the licence.