Collision Avoidance by Identifying Risks for Detected Objects in Autonomous Vehicles
DOI:
https://doi.org/10.14464/ess.v7i1.472Abstract
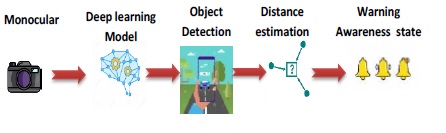
We propose a system which will detect objects on
our roads, estimate the distance of these object from the camera
and alert the driver if this distance is equal or less than the
threshold value(02meters),and assist the driver and alert him as
soon as possible in order for him to take appropriate actions as
soon as possible which can avoid any collision or significantly
reduce it. We plan to use state of the arts object detection models
like YOLO to identify the target object classes and use depth
maps from monocular camera to be give an accurate estimate of
the distance of the detected object from the camera. one major
requirement of this system is the real-time behaviour and a high
accuracy for the detected and estimated distance, A second
requirement is to make the system cheap and easy useable
comparatively to the other existing methods. That is why we
decided to use monocular camera images and depth maps which
makes the solution cheap and innovative. This project
(prototype) provide room for bigger and more complete project
which will contribute to the creation of tool which can save lives
and improve security on our roads
Downloads
Published
Issue
Section
License
Copyright for articles published in this journal is retained by the authors. The content is published under a Creative Commons Licence Attribution 4.0 International (CC BY 4.0). This permits use, distribution, and reproduction in any medium, provided the original work is properly cited, and is otherwise in compliance with the licence.