Real-time 3D Perception of Scene with Monocular Camera
DOI:
https://doi.org/10.14464/ess.v7i2.436Abstract
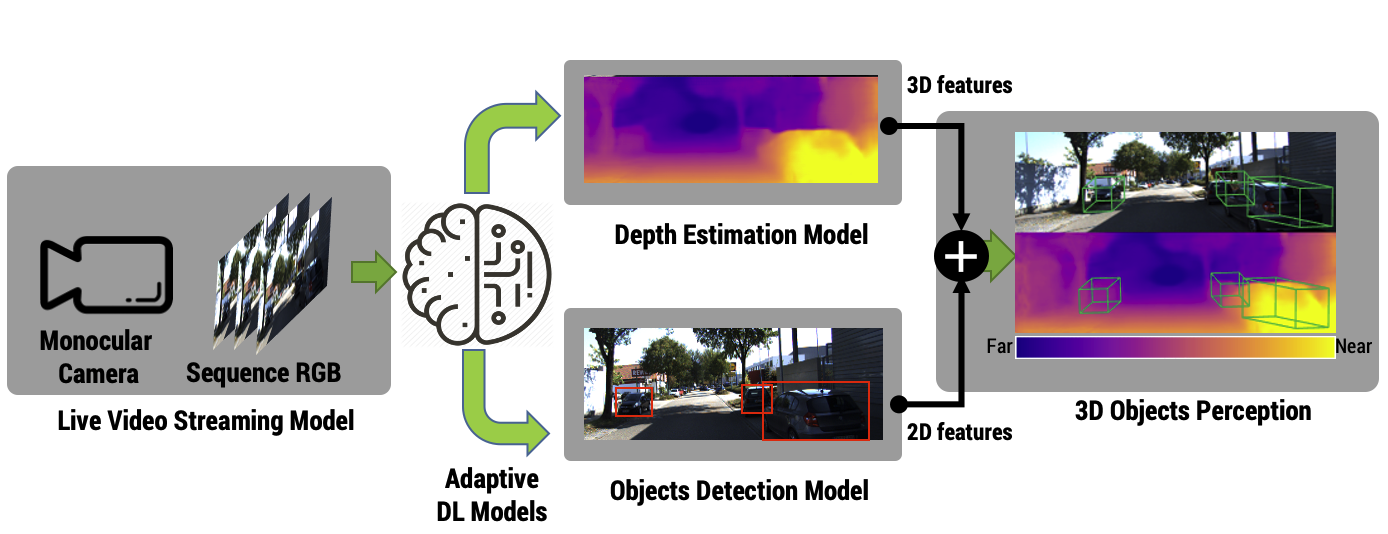
Depth is a vital prerequisite for the fulfillment of various tasks such as perception, navigation, and planning. Estimating depth using only a single image is a challenging task since the analytic mapping is not available between the intensity image and its depth where the features cue of the context is usually absent in the single image. Furthermore, most current researchers rely on the supervised Learning approach to handle depth estimation. Therefore, the demand for recorded ground truth depth is important at the training time, which is actually tricky and costly. This study presents two approaches (unsupervised learning and semi-supervised learning) to learn the depth information using only a single RGB-image. The main objective of depth estimation is to extract a representation of the spatial structure of the environment and to restore the 3D shape and visual appearance of objects in imagery.
Downloads
Published
Issue
Section
License
Copyright for articles published in this journal is retained by the authors. The content is published under a Creative Commons Licence Attribution 4.0 International (CC BY 4.0). This permits use, distribution, and reproduction in any medium, provided the original work is properly cited, and is otherwise in compliance with the licence.